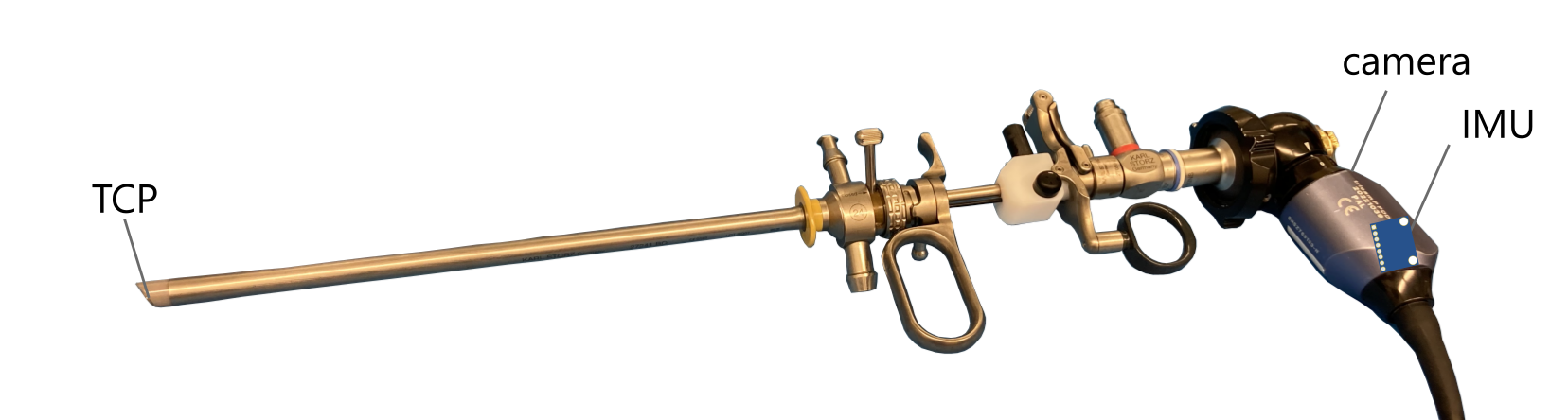
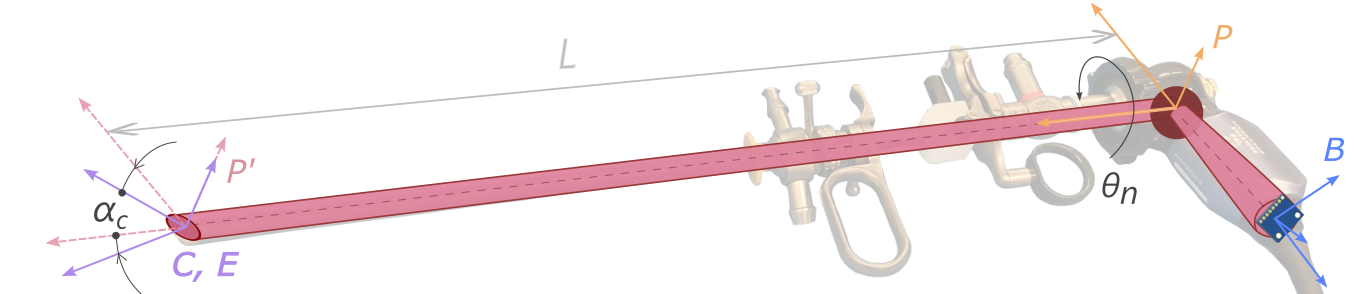
Implementation of a loosely-coupled VI-ESKF SLAM to estimate the calibration parameters in a cystoscopic camera-IMU sensor setup.
Index
Module Index
Search Page